Resolving Ambiguity in 3D Gaze
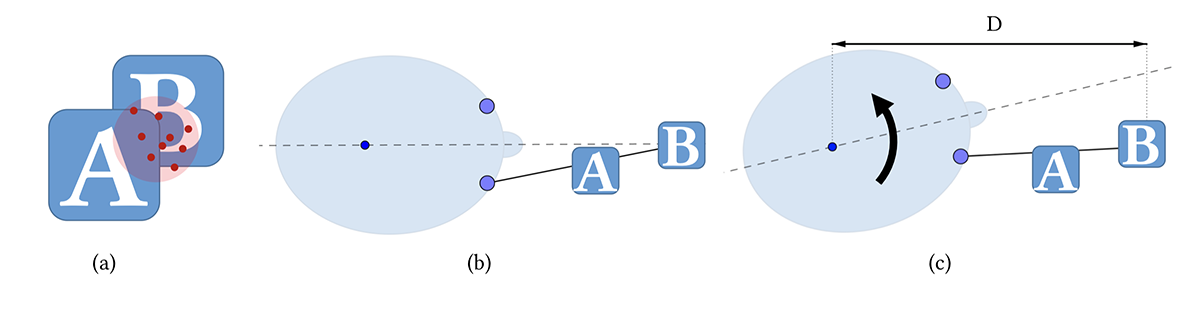
Overview: VOR Depth Estimation is a novel technique enabling disambiguation of gaze targets in 3D environments. Ambiguity arises due to gaze imprecision when objects overlap in the field of view (a), as a result of their placement in 3D (b). This can be resolved when users complete the selection with a head rotation while maintaining gaze focus based on the vestibulo-ocular reflex (VOR), allowing target depth to be obtained from comparison of the angular velocities of eye and head.
Abstract: Target disambiguation is a common problem in gaze interfaces, as eye tracking has accuracy and precision limitations. In 3D environments this is compounded by objects overlapping in the field of view, as a result of their positioning at different depth with partial occlusion. We introduce VOR depth estimation, a method based on the vestibulo-ocular reflex of the eyes in compensation of head movement, and explore its application to resolve target ambiguity. The method estimates gaze depth by comparing the rotations of the eye and the head when the users look at a target and deliberately rotate their head. We show that VOR eye movement presents an alternative to vergence for gaze depth estimation, that is feasible also with monocular tracking. In an evaluation of its use for target disambiguation, our method outperforms vergence for targets presented at greater depth.
Acknowledgements: This work is funded by the EPSRC project MODEM Grant No. EP/M006255/1. Tobias is partially supported by the Marsden Fund Council from Government funding, administered by the Royal Society of NZ.
Video: